Ivan Dokmanić
Coordinated Science Laboratory. ECE Illinois.

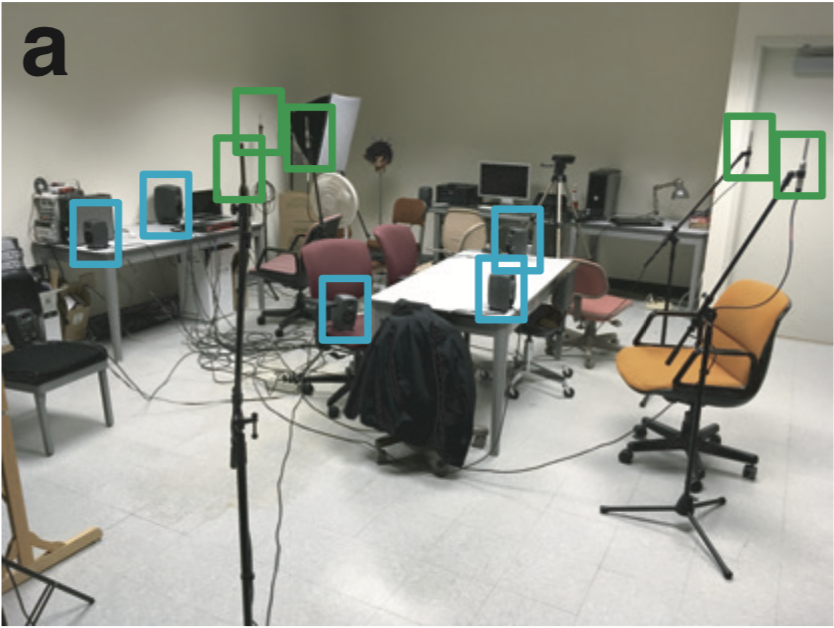
I am an assistant professor in the Coordinated Science Laboratory. My research interests lie at the intersection of signal processing, machine learning, and applied inverse problems, often involving sound.
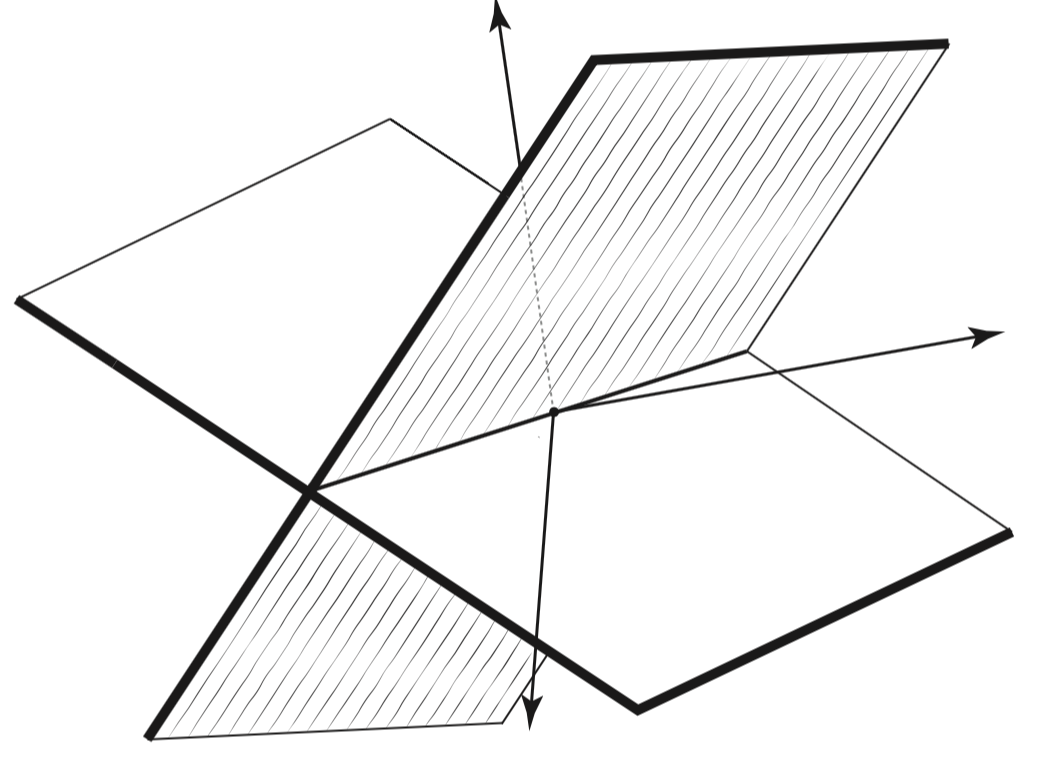
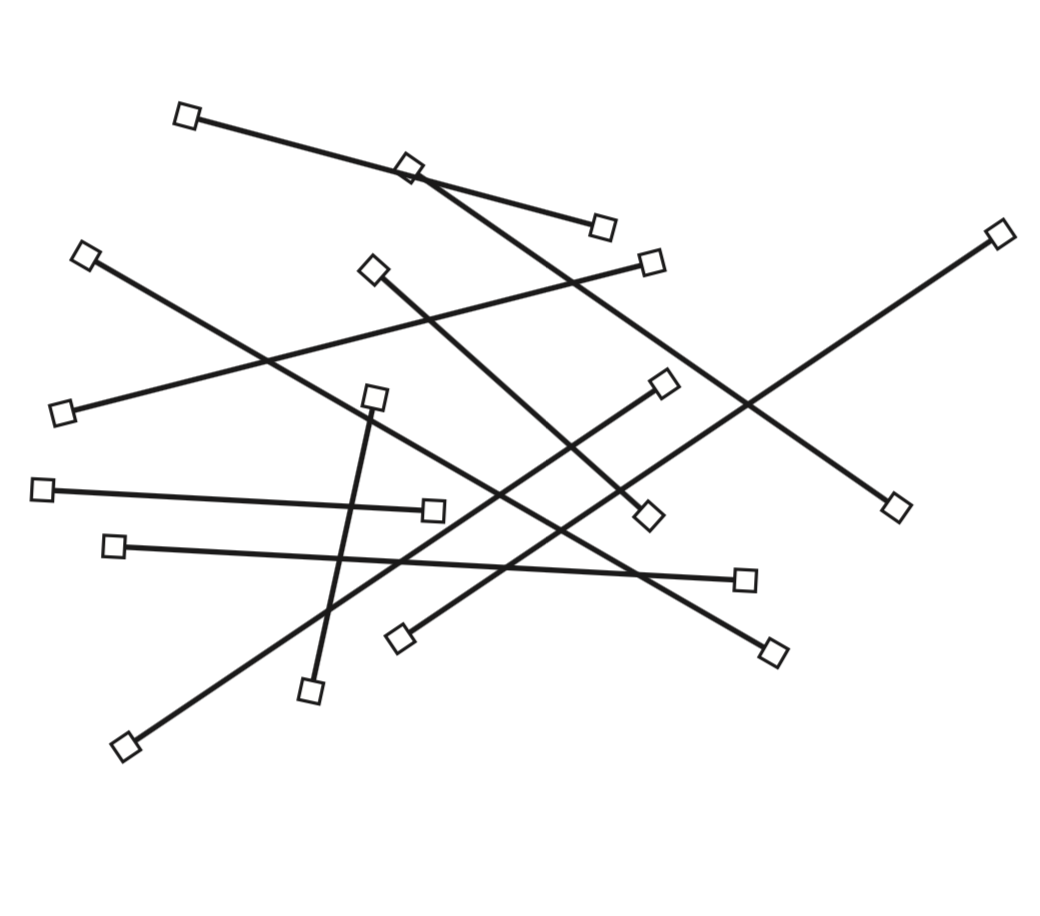
In particular, my ongoing work is in two major directions: the theory and applications of machine learning in inverse problems, and the role of distance geometry and related combinatorial problems (unlabeled sensing) in molecular imaging and acoustics.
I gratefully acknowledge support from the National science foundation, Google, VISA, and nVidia.
news
| April 2, 2019 | I will be speaking at the IPAM Workshop on Deep Learning and Medical Applications taking place January 27-31, 2020. |
 |
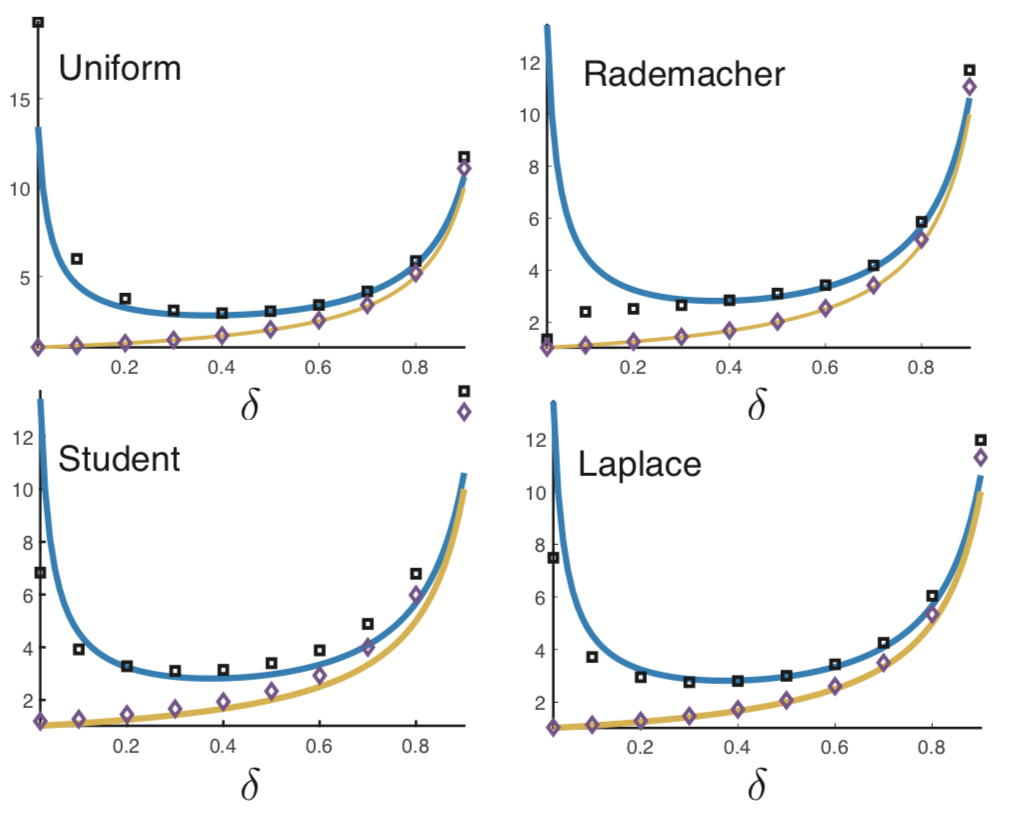
permutations unlabeled beyond sampling unknown
unlabeled sampling paper accepted to SPLetters |
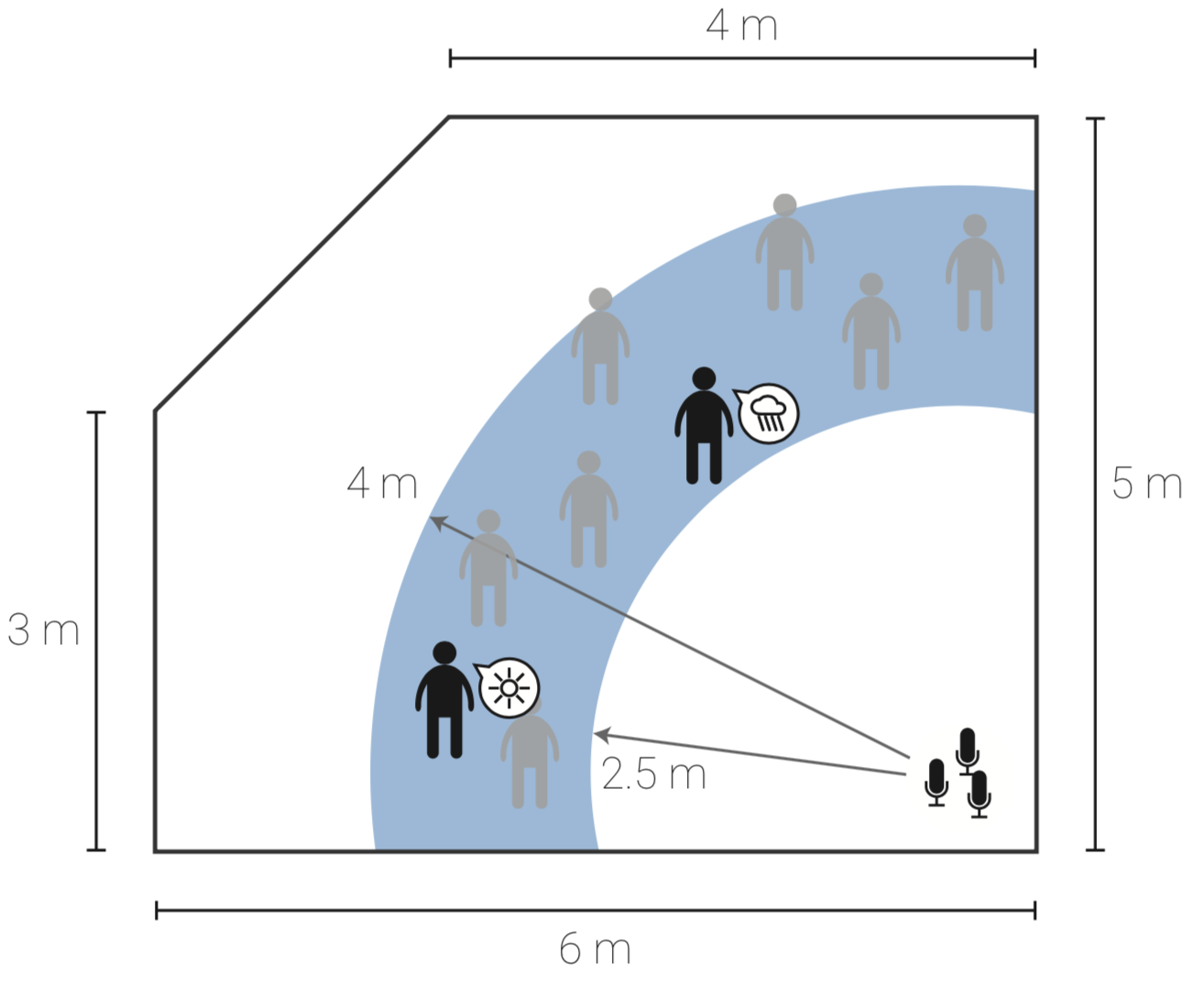
| February 2, 2019 | Four papers accepted to ICASSP! Puoya’s On the move: Localization with Kinetic Euclidean Distance Matrices, Shuai’s and Sid’s Solving Complex Quadratic Equations with Full-Rank Random Gaussian Matrices, and Anadi’s, Yu-Jeh’s and Jonah’s Multipath-Enabled Private Audio with Noise, and Mona’s, Shuai’s, and Jane’s ``Geometric Invariants for Sparse Unknown-View Tomography’’. |
| January 30, 2019 | A new preprint on learnability of a class of operators relevant for inverse problems: Learning Schatten-von Neumann Operators. |
| December 21, 2018 | Our paper on Random mesh projections for inverse problems was accepted to International Conference on Learning Representations (ICLR) 2019! |
| November 11, 2018 | In spring 2019, I will teach a new course on “Inverse Problems and Machine Learning”. Check out the syllabus under “Teaching”. |
 |
new paper in SIAM matrix analysis and applications
concentration inequalities for norms of pseudoinverses |
| August 28, 2018 | I will speak at the NIPS workshop on Machine Learning for Geophysical & Geochemical Signals. |
 |
NSF award: distances without labels
NSF award for "combinatorial inverse problems in distance geometry" |
 |
cocktails, but no party
our paper on multipath-enabled private audio was accepted to iwaenc |
 |
regularization by random mesh projections
preprint and talk at the SIAM imaging meeting |
 |
three papers presented at icassp
source separation with echoes, rapid prototyping of audio algorithms, sensor positioning with planewaves. |
| April 11, 2018 | I gave a talk on “Euclid’s bag of tricks for moving points and unlabeled distances” in the SILO seminar at the University of Wisconsin-Madison. |
| April 6, 2018 | I gave a talk in the CISE seminar at Boston University. |
 |
most innovative at engineering open house
Yu-Jeh and Jonah win 2nd place in engineering open house competition for the most innovative exhibit |